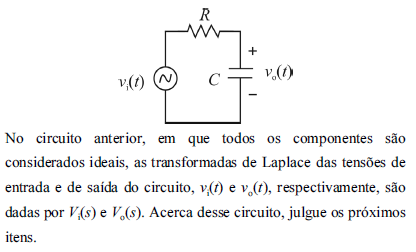
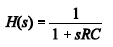
A função de transferência H(s)=Vo(s)/Vi(s), no domínio da transformada de Laplace, é representada pela expressão a seguir, em que R é um resistor e C um capacitor.
Esse processo é subamortecido, ou seja, possui resposta transitória oscilante para uma excitação de entrada do tipo degrau.
Quando representado no espaço de estados, esse sistema possui três autovalores distintos.
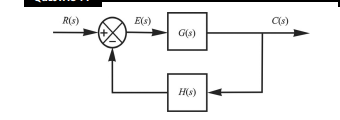
Considerando a figura precedente, que ilustra o diagrama de blocos
de um sistema de controle com realimentação, assinale a opção
correta, acerca dos métodos de análise de estabilidade desse
sistema.
De acordo com a teoria de controle, julgue os itens subsecutivos.
Um sistema linear invariante no tempo (LIT) será considerado estável se todas as raízes do polinômio do denominador de sua função de transferência tiverem parte real negativa
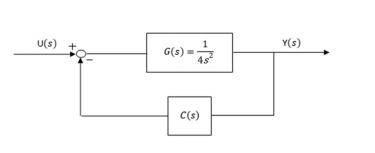
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue os próximos itens
com referência à análise de estabilidade.
Se o controlador em questão, C(s), for igual a 5s + 1, então o
sistema em malha fechada será estável.
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue os próximos itens
com referência à análise de estabilidade.
O sistema apresentado é um sistema de controle com retroação,
o qual possui maior robustez a perturbações externas e a
variações internas de parâmetros em comparação com sistemas
sem retroação.
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue os próximos itens
com referência à análise de estabilidade.
Ao se utilizar um controlador C(s) do tipo
proporcional-integral, o sistema em malha fechada será de
segunda ordem.
Uma abordagem moderna da teoria de controle representa sistemas dinâmicos em termos de variáveis de estados. Nessa representação, os sistemas dinâmicos são descritos por meio de um conjunto de equações diferenciais de primeira ordem acoplado a um conjunto de variáveis internas, chamadas de variáveis de estado. Um conjunto de equações algébricas relacionando as variáveis de estado às saídas físicas do sistema completa a descrição. Uma das representações possíveis por variáveis de estado para sistemas com polos diferentes, conhecida como forma canônica diagonal, é dada pelo seguinte conjunto de equações:
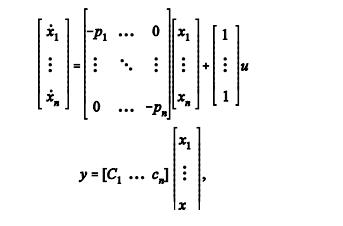
onde p i e ci representam, respectivamente, os polos do sistema e as amplitudes associadas aos polos. Nesse conjunto de equações, u denota a entrada do sistema e y é a saída correspondente. Com relação à descrição de sistemas dinâmicos lineares por variáveis de estado, julgue o item a seguir.
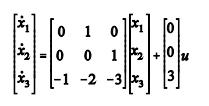
Um sistema dinâmico linear governado pela equação diferencial , cujas variáveis de estado são
, cujas variáveis de estado são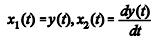 e
e possui a equação de estados apresentada abaixo.
possui a equação de estados apresentada abaixo.
Acerca da estabilidade de sistemas dinâmicos e suas características
nos domínios do tempo e da frequência, julgue os itens a seguir.
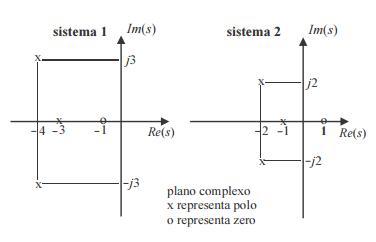
Considere dois sistemas dinâmicos lineares cujos polos e zeros de suas funções de transferência em malha fechada são ilustrados na figura abaixo. Nessa situação, é correto afirmar que ambos os sistemas são estáveis, as constantes de tempo do sistema 1 são menores que as constantes de tempo do sistema 2, e a frequência natural do sistema 1 é maior que a frequência natural do sistema 2.
Considerando um filtro analógico cuja função de transferência é dada por  , julgue o item que se segue.
, julgue o item que se segue.
O filtro é do tipo passa-alta.
Considerando um filtro analógico cuja função de transferência é
dada por , julgue os itens que se seguem.
Considere que um sinal analógico u(t) seja aplicado à entrada do filtro, resultando em um sinal filtrado y(t) na saída. Nessa situação, se h(t) é a resposta ao impulso do filtro, então o sinal filtrado pode ser obtido por meio da relação y(t) = h(t)u(t).