O controlador PID é muito utilizado na indústria devido à sua capacidade de controlar adequadamente a dinâmica de uma grande variedade de processos industriais, mesmo possuindo uma estrutura de controle relativamente simples.
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta;
• r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente;
• KP, TI e TD são os parâmetros do controlador modificado
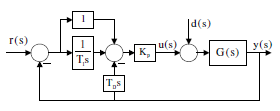
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de