Uma abordagem moderna da teoria de controle representa sistemas
dinâmicos em termos de variáveis de estados. Nessa representação,
os sistemas dinâmicos são descritos por meio de um conjunto de
equações diferenciais de primeira ordem acoplado a um conjunto de
variáveis internas, chamadas de variáveis de estado. Um conjunto
de equações algébricas relacionando as variáveis de estado às saídas
físicas do sistema completa a descrição. Uma das representações
possíveis por variáveis de estado para sistemas com polos
diferentes, conhecida como forma canônica diagonal, é dada pelo
seguinte conjunto de equações:
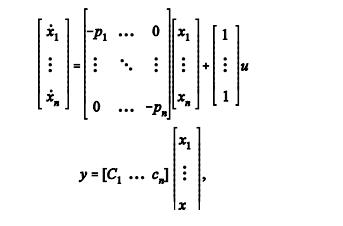
onde p i e ci representam, respectivamente, os polos do sistema e as
amplitudes associadas aos polos. Nesse conjunto de equações, u
denota a entrada do sistema e y é a saída correspondente. Com
relação à descrição de sistemas dinâmicos lineares por variáveis de
estado, julgue os itens a seguir.
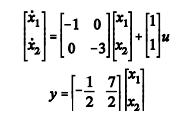
A representação na forma canônica diagonal de um sistema com função de transferência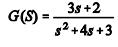 é dada por
é dada por