A medição de pressão assume papel de destaque nos sistemas industriais. Um dos transdutores manométricos mais utilizados tem como princípio de funcionamento a alteração da curvatura original em um tubo de seção oval, o qual tende a ficar circular a partir da pressão exercida internamente. Comercialmente, ele se apresenta com curvatura em várias formas (C, helicoidal, espiral). O dispositivo apresenta em geral uma das suas extremidades fechada e conectada a um mecanismo que movimenta um ponteiro, possuindo, em alguns casos, engrenagens para realizar esta tarefa. Este tipo de equipamento tem normalmente baixo custo e elevada longevidade, sendo comum em aplicações industriais. Tal dispositivo é denominado
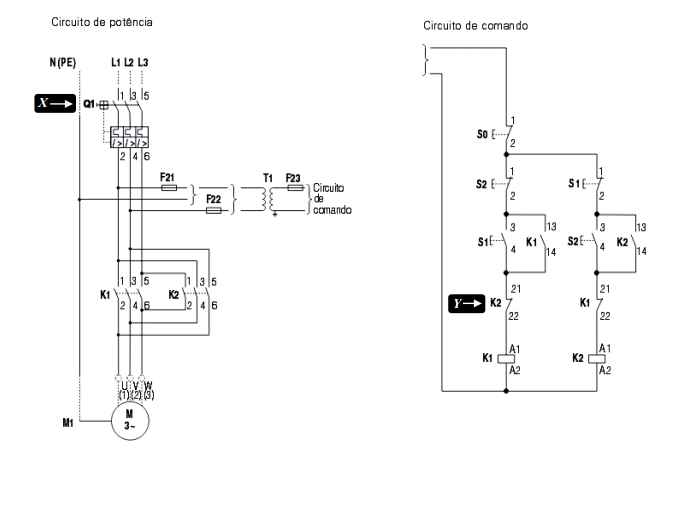
Em relação ao acionamento de motores elétricos em ambientes industriais, são utilizados
frequentemente diversos componentes e técnicas para atender a parâmetros que minimizem as
solicitações eletromecânicas durante a partida. Desta forma, são cumpridas as finalidades e
restrições específicas da aplicação, além de que se amplia a vida útil das máquinas. Neste
contexto, informe a que se referem os elementos destacados (X;Y) nos diagramas de potência
(força) e comando apresentados e o referido esquema de partida do motor.
A fim de realizar a operação de processamento de um sinal elétrico (Vin) de baixa amplitude na
saída de um aparelho eletrônico, o responsável pela manutenção fez uso de um osciloscópio de
modo a visualizar o referido sinal. Antes das análises, ele garantiu o devido ajuste de atenuação
das pontas de prova sob uso (x1), adequação do nível de trigger e ganho DC nulo. O perfil do
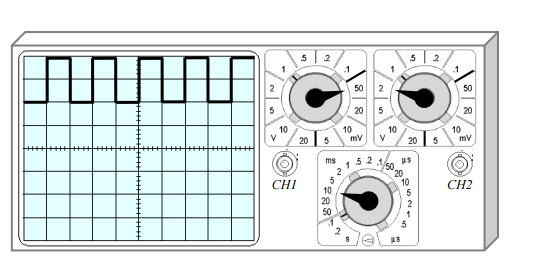
sinal Vin é descrito a seguir, sendo visualizado no canal 1 (CH1). As respectivas configurações de
amplitude (milivolts/DIV ou volts/DIV) e tempo (time/DIV) do aparelho são apresentadas. Note
que o sinal apresenta período de 20 ms, valor mínimo 100 mV (Vin_min) e valor máximo 200 mV
(Vin_máx). Na tela do osciloscópio, o sinal ocupa duas divisões verticais entre o mínimo (Vin_min) e
o máximo valor (Vin_máx).
Em seguida, o profissional decidiu fazer uso de um circuito com amplificador operacional, tendo
como entrada o sinal Vin. Em protoboard conseguiu construir a topologia a seguir.
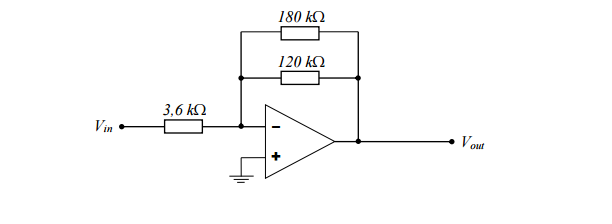
Admita que seja desejado visualizar a tensão de saída (Vout) no mesmo osciloscópio. Para isso, o
responsável admitiu a configuração (Volts/DIV) indicada no canal 2 (CH2).
Neste caso, assinale a alternativa que indica o número CORRETO de divisões verticais ocupadas
na tela do osciloscópio entre o valor mínimo e o valor máximo do sinal de tensão Vout.
Dadas as operações abaixo, assinale o resultado CORRETO para a soma e subtração,
respectivamente, lembrando que os resultados estão em hexadecimal.
A = (1001001+10111111)2 e B = (101111-101)2
Sobre os diodos especiais, é CORRETO afirmar:
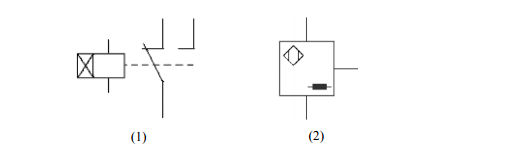
Em sistemas de automação industrial, sensores e atuadores são componentes fundamentais,
sendo amplamente aplicados em processos de produção, montagem e monitoramento. Em
relação à simbologia dos principais componentes, identifique os elementos numerados a seguir e
assinale a alternativa CORRETA.
Observe a estrutura do quadro de distribuição (QD) bifásico apresentado a seguir.
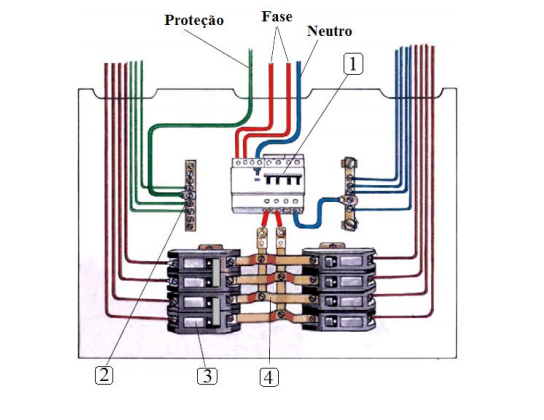
Assinale a alternativa com a identificação CORRETA dos elementos numerados.
Desde a concepção até a execução final do projeto de uma instalação elétrica, diversos elementos
são especificados para proteção. O aterramento, por exemplo, é um sistema de proteção formado
por um conjunto de componentes, os quais interligam com o solo as partes metálicas da
instalação ou os equipamentos conectados aos componentes (tomadas, luminárias, caixas,
tubulações, quadros, ...), denominados “massas". A partir disto, é estabelecido com o
aterramento um referencial de potencial zero. Em um dos cenários mais comuns, o aterramento
do neutro da fonte (rede da concessionária) é separado do aterramento dos componentes da
instalação como apresentado na figura a seguir, ou seja, existem hastes exclusivas para as
massas.
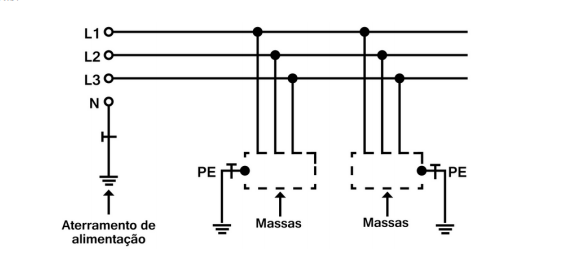
Este tipo de aterramento é denominado
São exemplos de aplicações utilizando flip-flops, EXCETO:
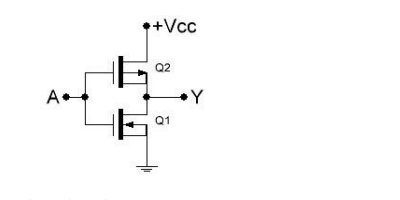
Dado o circuito baseado em MOSFETs da figura abaixo, assinale a alternativa que apresenta a
função lógica implementada pelo mesmo.
Considere as seguintes afirmativas sobre as características de motores elétricos, dispositivos
auxiliares e técnicas de acionamento.
I. Em circuitos do tipo estrela-triângulo, a corrente transitória de partida do motor é menor que
no caso da partida direta, reduzindo os estresses nos enrolamentos.
II. O Fator de Serviço significa um multiplicador que, quando aplicado à potência nominal do
motor, indica a carga permissível que pode ser aplicada em regime permanente.
III. Motores elétricos de indução do tipo monofásicos com rotor em formato de gaiola de
esquilo podem apresentar capacitor auxiliar de partida.
IV. A sobrecarga mecânica no eixo pode ser uma das causas de sobreaquecimento do motor.
Neste caso, relés de sobrecarga podem ser utilizados como medida de proteção.
V. O inversor de frequência é um dispositivo com parâmetros programáveis que, dentre suas
funções, permite controlar a velocidade de motores, suavizando o acionamento.
Assinale a alternativa CORRETA.
Associe corretamente os componentes/princípios apresentados na primeira coluna de acordo com
o tipo de variável/transdutor industrial a qual está associado na segunda coluna.

Marque a opção com a sequência CORRETA.
São circuitos integrados de amplificador operacional comerciais:
Sobre os conversores A/D e D/A, é possível afirmar que
I. a conversão D/A é o processo de conversão de uma tensão ou corrente para um valor
representado em código digital (como binário ou BCD).
II. a função do transdutor é converter a variável física em elétrica. Alguns transdutores comuns
são sensores de temperatura, fotocélulas e fotodiodos.
III. a saída elétrica analógica do transdutor serve como entrada analógica do conversor
analógico-digital (ADC). Este converte essa entrada analógica em saída digital, que consiste
de um número de bits que representa o valor da entrada analógica.
IV. a resolução de um conversor D/A é definida como a menor variação na saída analógica
como resultado de mudança na entrada digital.
V. erro de offset é o desvio máximo da saída do conversor digital-analógico (DAC) do valor
esperado (ideal), expresso como porcentagem do erro de offset. Então se o conversor
apresentar um erro de offset de ±0,05% e esse conversor tem tensão de entrada 10V, esse
percentual de erro de offset é de até 5 mV.
Estão CORRETOS os itens
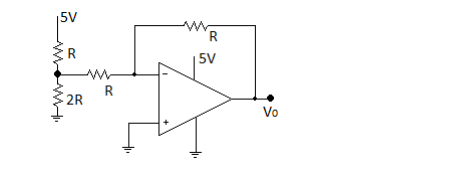
Dado o diagrama abaixo, implementado com o circuito integrado LM324, indique a tensão de
saída (V0) desse circuito.