Em sistemas robóticos, a cinemática estuda os movimentos dos(as)
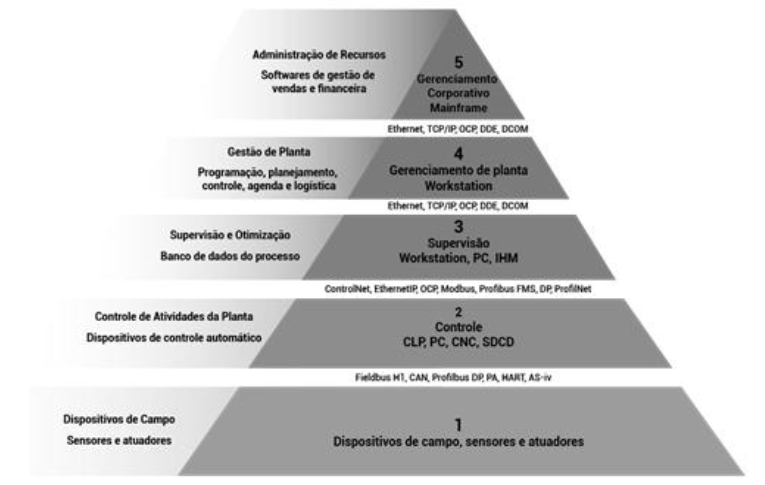
Segundo MARCEL DE ROURE, ENGENHEIRO CHEFE NA LINCE/AUTOMAÇÃO E CONTROLE, a “Pirâmide de Automação Industrial" é uma boa forma de entender um pouco mais sobre a automação como um todo". A figura a seguir mostra um esquema da pirâmide de automação industrial. Sobre a pirâmide de automação industrial, é correto afirmar que
A resposta de um sistema controlado é definida através de um programa do usuário e do comportamento das entradas e saídas. Na figura abaixo são mostrados os tipos de entradas e saídas utilizados na automação industrial, configurados em um controlador lógico programável.
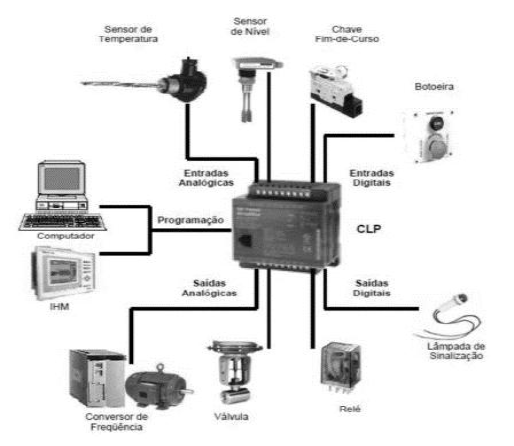
Em relação às entradas ou saídas utilizadas na automação industrial e configuradas em um controlador lógico programável, é correto afirmar que
Nas montagens e manutenções de circuitos eletrônicos, muitas vezes é necessário testar componentes que estão sendo utilizados. Com instrumentos simples, como o multímetro analógico, é possível a realização de alguns testes. Para determinar se o diodo está defeituoso, não é necessário identificar os terminais anodo e catodo. Deve-se apenas colocar as pontas de prova do multiteste sobre o diodo nos dois sentidos possíveis, conforme mostra a figura abaixo.

Para verificar a condição de um diodo, realizou-se a medida de resistência elétrica nas duas condições da figura acima. Como resultado, verificou-se que as duas leituras indicaram alta resistência. Esses resultados indicam que o diodo está
O conteúdo espectral de um sinal de fala essencial para comunicações telefônicas situa-se na faixa de frequência de 300 a 3100 Hz. Para extrair o conteúdo de informação fundamental de um sinal de fala para esse tipo de aplicação, necessita-se de um sistema seletivo de frequências, ou seja, um filtro que limite o espectro do sinal à faixa desejada de frequências. Nesse sentido, é correto afirmar que os filtros podem ser do tipo
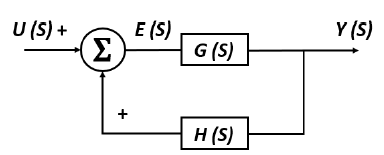
Com base no diagrama de bloco da figura, a equação algébrica que representa a transferência de malha fechada é
Com relação à compensação derivativa ideal (PD), considere as seguintes afirmativas: I. Promove melhora nas repostas do sistema através do ajuste do ganho. II. Como consequência de sua utilização, o aumento do erro total do sistema é amplificado. III. O compensador derivativo ideal requer um circuito ativo para realizar a derivação. IV. Ao se utilizar o compensador derivativo, o nível do ruído é baixo, mas a frequência do ruído é alta comparada com o sinal. Estão corretas as afirmativas
A figura apresenta um reservatório conectado por um tubo a uma estação geradora de energia hidrelétrica. O reservatório é uma fonte de energia hídrica conectada por uma tubulação a um sistema (a estação geradora de energia hídrica). As variáveis do sistema que dão a energia fornecida à estação geradora são a vazão volumétrica de fluido Q e a pressão P medida na entrada em relação a algum valor de pressão no domínio do tempo E.
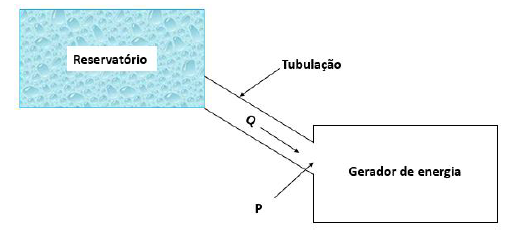
Com base na representação gráfica, a variável energia fornecida ao sistema (E), que é entregue à estação geradora é
A norma IEC 61131 define o sequenciamento gráfico de funções, SFC. Segundo essa norma e observando-se o diagrama, analise as afirmações:
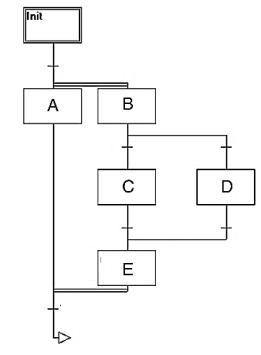
I. A e B são passos simultâneos que serão executados em paralelo.
II. Os passos B, C e E formam uma sequência incondicional serial.
III. O passo E somente será executado depois da convergência AND entre C e D.
Está CORRETO apenas o que se afirma em:
O SDCD (Sistema Digital de Controle Distribuído), ou apenas SCD, é uma das tecnologias utilizadas em automação de sistemas industriais. Outras tecnologias muito empregadas são o CLP (Controlador Lógico Programável) e os sistemas SCADA (Supervisory Control and Data Acquisition), também denominados Sistemas Supervisórios.
Com relação a essas três tecnologias, pode-se afirmar:
I. SDCD são sistemas que integram as funcionalidades de controle e supervisão em uma única solução.
II. CLPs são plataformas microprocessadas capazes de manipulação de sinais analógicos e controle discreto, destituídos de interfaces homem-máquina elaboradas para sua operação.
III. Sistemas Supervisórios são softwares que rodam em computadores e oferecem recursos de supervisão e controle de processos industriais, desde que se comuniquem com CLPs ou similares para aquisição de dados.
São verdadeiras as afirmativas:
Analise as seguintes afirmativas sobre as TERMORESISTÊNCIAS:
1 - Para metais puros, a relação entre a resistência e a temperatura pode ser expressa aproximadamente por: Rt = Ro(1+at), sendo Ro o valor da resistência a 100°C e “a" uma constante que depende do material.
2 - Na medição a 4 fios, a resistência de contato nos terminais do sensor e instrumento de painel não produzem erros, porque este método se baseia em uma fonte de corrente constante.
3 - Na medição a três fios, a precisão da medida vai depender do comprimento da ligação campo painel.
4 - Na medição a dois fios, o negativo da fonte é levado até o ponto de medição no campo.
5 - O transmissor de temperatura permite que se utilizem 2 fios na ligação campo painel, mesmo que se empregue o método de medição a três fios.
São CORRETAS as afirmativas:
Analise as afirmativas a seguir sobre o “STRAIN GAGE":
1 - Num “strain gage", se os quatro braços sensores sofrem uma tensão igual, então a saída da ponte será nula.
2 - Células “strain gage" são amplamente empregadas na medição de peso, torque e força.
3 - Num “strain gage" variam o comprimento e a área, mas a resistividade permanece sempre constante.
4 - A sensibilidade do “strain gage" dá uma medida da variação relativa de sua resistência em função de uma variação no seu comprimento.
5 - A histerese mecânica e a dilatação linear são fontes de erro na medição com “strain gages".
São CORRETAS as afirmativas:
A figura a seguir mostra a saída m(t) de um algoritmo PID para a entrada e(t).
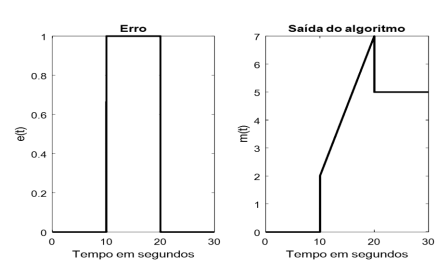
Sabendo que a equação do algoritmo é:

Analise as afirmativas a seguir:
1 - O algoritmo empregado é o PID ISA ou PID ideal.
2 - O algoritmo empregado é o PID paralelo ou clássico.
3 - Analisando a figura, conclui-se que: KP = 1, TI = 2 e TD = 1.
4 - Analisando a figura, conclui-se que: KP = 2, TI = 4 e TD = 0.
São CORRETAS as afirmativas:
Em um sistema de controle, o corpo humano é considerado: I. com retroalimentação; II. de malha aberta; III. de malha fechada; IV. de aquecimento de malha semifechada; V. de aquecimento de malha semiaberta. Estão corretos os itens
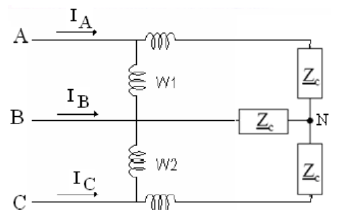
Para o sistema trifásico da figura, o método dos dois wattímetros permite as seguintes leituras: W1 = 1.130 W e W2 = 2.540 W, quando estão conectados a uma carga equilibrada conectada em estrela. Sendo Vef-AN= 220 V (tensão de fase eficaz), o valor da impedância de fase em Ω é